 |
 |
 |
 |
 Какими будут самолеты  Причина ТехПрорывова  Преимущества бизнес-авиации  Навигационные системы  Советы для путешественников с собакой |
Главная » Электрика » Внутрисхемное диагностирование (серийное) 1 2 3 4 5 6 ... 17 МАТЕМАТИЧЕСКИЕ МОДЕЛИ ЦИФРОВЫХ УСТРОЙСТВ При диагностировании ПУ используются два вида моделей цифровых устройств: функционально-логические и структурно-логические. Функционально-логические модели рассматривают ОД как некоторый черный ящик и устанавливают лишь функциональные зависимости между входными и выходными сигналами. Наибольшее распространение среди функциональных моделей получили автоматные [48]. При решении задач внутрисхемного диагностирования недостаточно описания функций, реализуемых ОД. Необходимо построение моделей, отражающих состав и правила работы отдельных компонентов, способы их соединения и взаимодействия с внешней средой i31]. Такие функции выполняют структурно-логические модели. В качестве структурно-логической модели обычно принимается логическая сеть или логическая схема. Логической схеме может быть поставлен в соответствие ориентированный граф, вершинам которого соответствуют логические элементы, входные и выходные полюса схемы, а дугам - соединения схемы. Граф, в свою очередь, может быть задан матрицей инцидентностей [50]. В последние годы при моделировании различных цифровых устройств применяются сет л Петри (СП) [67]. Объект диагностирования, состоящий из множества относительно независимых между собою и конструктивно законченных компонентов, является весьма удобным для описания СП. Большое значение имеет тот факт, что теория СП, в отличие от теории конечных автоматов, допускает существование конфликтов и параллелизма. Сетью Петри N называют набор [40] N = (Р, L, F, М0), аде Р = {Plt Р2, Рт) - множество позиций; L = 12, ... ...,/ } - множество переходов; F - отношение инцидентности; М0 - начальная маркировка сети. Каждому переходу lt £ L соответствует некоторое множество PiBX И Р,:ВЫх ВХОДНЫХ И ВЫХОДНЫХ ПОЗИЦИЙ. Обычно подход к описанию процессов в цифровых устройствах с помощью СП базируется на двух главных понятиях: события и условия. События выражают действия, происходящие в моделируемой системе. Некоторая последовательность действий определяется множеством внешних воздействий и внутренним состоянием моделируемого объекта. Данное множество в свою очередь описывается множеством условий. Условие может принимать значения Логической 1 или логического 0 . В СП условия представляются позициями, а события - переходами. Такой подход к моделированию узлов РЭА СП имеет ряд недостатков. Рассмотрим логический элемент ЗИ - НЕ (рис. 2.4, а), и СП, моделирующую его функционирование (рис. 2.4, б). Как видно, описание даже такого простого элемента содержит 8 позиций, 8 переходов и 32 дуги. Естественно предположить, что СП, представляющая сложную цифровую схему, будет содержать очень большое число элементов. Многие современные БИС, помимо основных двух логических состояний, могут находиться в третьем, высокоимпен-дансном состоянии. Необходимость учета третьего состояния при описании компонентов с шинной структурой приводит к еще большему усложнению моделей. Отсутствие наглядности, громоздкость значительно усложня- Вх2 ют работу с такой СП, даже Вх.1. Bx.Z-Bx.J  Bx.J  Рис. 2.4. Элемент и сеть Петри: схема элемента ЗИ-НЕ ; б - сеть Петри, реализующая функцию этого элемента. если она адекватно отображает функционирование исправной схемы и позволяет моделировать возможные неисправности в ней. В работе [28] предложен иной подход к моделированию цифровых узлов РЭА СП в терминах компоненты - соединения , основанный на отображении СП структуры схемы. Достоинством такого подхода является возможность распространения его на моделирование гибридных ПУ, содержащих соединения аналоговых и цифровых компонентов. 2. СЕТЕВЫЕ МОДЕЛИ ГИБРИДНЫХ ПУ ФИЗИЧЕСКИЕ ОСНОВЫ МОДЕЛИРОВАНИЯ Моделируемый ПУ состоит из печатной платы с расположенными на ней аналоговыми и цифровыми компонентами и проводниками. Компоненты объединяются в электрическую цепь путем соединения их внешних выводов с проводниками. С одним проводником могут соединяться несколько выводов одного или различных компонентов. Такой проводник назовем многополюсным. В зависимости ог функционального назначения компонент может иметь выводы, принимающие информацию (входы компонента) и передающие информацию (выходы компонента). Некоторые аналоговые и сложные цифровые компоненты (микропроцессоры, двунаправленные регистры и другие) имеют выводы, которые одновременно служат как для приема, так и для передачи информации. Такие выводы называют двунаправленными Каждый двунаправленный вывод будем искусственно расщеплять на два и приписывать одному из них функции входа, а другому функции выхода. 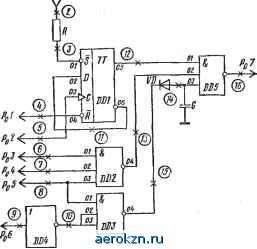 Рис. 2.5. Фрагмент схемы гибридного печатного узла. На рис. 2.5 представлен фрагмент схемы гибридного ПУ, содержащий как цифровые, так и аналоговые компоненты. Цепочку, состоящую из диода VD и конденсатора С, можно рассматривать как некоторый элемент задержки. Вход элемента задержки подключен к выходу 04 микросхемы DD3, а выход - к входу 03 микросхемы DD5. Все проводники пронумерованы цифрами в кружках. Большинство проводников содержит 2 полюса. Все полюса проводника можно разделить на входные и выходные. Будем считать входными те полюса, которые соединены с выходами компонентов, и, наоборот, полюса проводника, соединенные со входами компонентов, назовем выходными. Полюса проводников, служащие для соединения с внешними по отношению к ПУустройствами, в зависимости от их назначения также могут быть входными и выходными. Если такой полюс подключен к двунаправленному выводу, то необходимо произвести расщепление-вывода. Выполнив таким образом упорядочение выводов элементов моделируемого ПУ, получим схему, удовлетворяющую следующим требованиям: каждый входной полюс проводника может соединяться только с одним выходом какого-либо компонента; каждый выходной - с одним входом какого-либо компонента. Аналоговые компоненты, входящие в моделируемый ПУ, могут объединяться в функционально законченные элементы, имеющие входные и выходные выво- -*£ © ды. Например, диод VD и конденсатор С, (рис. 2.5) образуют элемент задержки VD, С, вход крторого соединен с выходом 04 микросхемы DD3, а выход - со входом 03 микросхемы DD5. Резистор R имеет вход, подключенный к источнику питания, и выход, соединенный с выводом 01 микросхемы DDI. Информация между элементами моделируемых ПУ передается с помощью электрических сигналов. В устройствах с шинной структурой, имеющих несколько выходов, объединенных одним проводником,а также в неисправных схемах, имеющих ложные перемычки между двумя выходными контактами, возможно возникновение конфликтных ситуаций, когда сигналы © © ® © © © © © © © © © ® Рис. 2.6. Схема соединения шинных формирователей. элементов, выходы которых соединены между собой, не совпадают. В дальнейшем будем придерживаться следующих правил разрешения конфликтных сигналов, справедливых для микросхем ТТЛ. 1. Логический нуль имеет самый высокий приоритет. Достаточно появления логического нуля на любом из соединенных выходов элементов, чтобы на всех полюсах проводника установился потенциал логического нуля. 2. Логическая единица имеет следующий приоритет. Потенциал логической единицы установится на всех полюсах проводника, объединяющих несколько выходов элементов, если на любом из выходов отсутствует сигнал логического нуля и хотя бы на одном из них присутствует сигнал логической единицы. 3. Третье, высокоимпедансное состояние имеет самый низкий приоритет и может устанавливаться на полюсах проводника, если все выходы элементов, подключенные к входным полюсам провод-шика, находятся в третьем состоянии. Фрагмент схемы, представленный на рис. 2.5, не содержит элементов, выходы которых соединены между собой. В таких схемах невозможно возникновение конфликтных ситуаций. й Рассмотрим схему соединения двух шинных формирователей К589АП16. представленную па рис. 2.6. Выводы Вс указанных тинных формирователей являются двунаправленными и в зависимости от значения сигналов УВ могут либо принимать, либо передавать информацию. Пареллельное соединение выводов Bt для двух ►шинных формирователей может привести к конфликтам. Разреше--ние указанных конфликтных ситуаций происходит по вышеуказан-шым правилам. ИНТЕРПРЕТАЦИЯ СП ГИБРИДНЫХ УЗЛОВ РЭА Основными понятиями при данном подходе к моделям гибридных ПУ СП являются понятия компонентов и соединений, определенные выше. В СП компоненты представляются переходами, а соединения внешних выходов компонентов с полюсами проводников - позициями. Поскольку проводник является одним из элементов схемы, в СП он также представляется в виде перехода. На рис. 2.7 приведена СП, моделирующая фрагмент схемы, изображенный на рис. 2.5. Условимся переходы, моделирующие проводники, называть простыми переходами и обозначать их одной чертой. Переходы, моделирующие ЭРЭ, назовем сложными и обозначим их двумя, чертами. Номера простых переходов соответствуют номерам проводников (на рис. 2.5 они обведены кружками). Обозначения сложных переходов на рис. 2.7 соответствуют обозначениям ЭРЭ. Переход VD, С моделирует цепочку задержки, состоящую из диода VD и конденсатора С. Из рис. 2.7 видно, что каждый из простых переходов имеет лишь по одному входу и, следовательно, конфликтные ситуации в этих проводниках невозможны. Соединению схемы с внешними устройствами соответствует множество ВХОДНЫХ И ВЫХОДНЫХ ПОЗИЦИЙ Р0 - {Роъ Рп2, ; Рок}- УСЛОВИМСЯ считать такие позиции внешними. Остальные позиции назовем внутренними по отношению к СП. С учетом сформированных ранее свойств можно утверждать, что каждая позиция Р{ в СП имеет только один вход и только один выход. Данная особенность приводит к представлению моделируемой схемы в виде определенного подкласса СП маркированных графов !{МГ). Отметим, что МГ является наряду с автоматными СП наиболее изученным подклассом СП, для которого существуют хорошо разработанные методы анализа. При функционировании СП между ее позициями перемещаются условные метки, называемые фишками. Если во всех входных позициях какого-либо перехода содержатся фишки, то такой пере< ход может быть запущен. При этом фишки перемещаются в выходные позиции данного перехода, а в его входных позициях фишки исчезают. Совокупность всех фишек, расположенных в позициях СП, называется ее разметкой. Перед запуском всей СП должна быть установлена ее начальная разметка. При начальной разметке во все 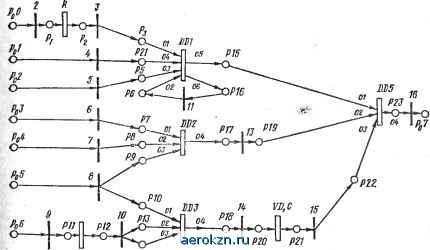 :Рис. 2.7. Сеть Петри, моделирующая фрагмент схемы, изображенной на рис. 2.5. [внешние входные позиции СП должны помещаться фишки. Эти фиш-йки соответствуют подаче сигналов на входы моделируемого ПУ. Важным структурным элементом МГ является цикл - замкнутый путь из какого-либо элемента СП в этот же элемент. На рис. 2.7, например, цикл - это путь, проходящий через позиции Р6 и /46. рЦикл в МГ соответствует контуру обратной связи в моделируемой Ссхеме. Например, рассмотренному выше циклу соответствует кон-ffyp обратной связи на рис. 2.5 с инвертирующего выхода триггера DD/ на его вход D. Для нормального функционирования МГ при начальной разметке в одну из позиций каждого цикла должна цоме-йцаться фишка. В противном случае переходы, принадлежащие цик-ру, никогда не смогут быть запущены. Перемещение фишек в MF Ьтражает распространение сигналов в моделируемом ПУ и определяет последовательность срабатывания переходов и порядок функционирования отдельных компонентов. Г. Описанный подход приводит к простому и наглядному представлению моделируемой схемы СП. Однако следует указать на ограни- ченность такой интерпретации. Моделируя работу управляющей части системы, СП не позволяет получить сведения о содержательном аспекте функционирования ПУ. Между тем, многие неисправности, возникающие в процессе работы устройства, связаны с нарушением выполнения компонентами своих функций и могут выража; ться в появлении сигналов, не соответствующих логике функционирования компонентов. Для моделирования таких неисправностей и анализа содержательной части вводится расширение предлагаемой модели. Оно заключается в том, что фишкам присваиваются определенные цвета. С помощью раскрашенных СП, например, более удобно описывать передачу данных в цифровых системах. Будем использовать раскрашенные СП для моделирования передачи различных значений цифровых сигналов. Как и раньше, появление сигнала на внешних выводах компонента представляется фишкой в соответствующей позиции. Однако теперь, в зависимости от значения появившегося сигнала, фишки будут иметь ту или иную окраску. Правила преобразования цветов фишек при запуске какого-ли бо сложного перехода зависят от закона функционирования соответствующего компонента. Этот закон определяется моделью компонента. В результате срабатывания сложного перехода в его выходных позициях могут появиться фишки различных цветов. Алгоритм запуска сложного перехода задается таблично, например, для простейших логических элементов или в виде микропрограммы (для микропроцессоров и некоторых других БИС). Сложный переход при необходимости может быть представлен в терминах события - условия некоторой подсетью СП. В этом случае правила его запуска будут определяться структурой подсети СП. При моделировании ПУ на ЭВМ правила запуска сложного перехода определяются специальной подпрограммой, характерной для компонентов данного типа. Правила запуска простых переходов, моделирующих проводники, сформулируем в соответствии с введенной ранее иерархией сигналов. Самый высокий приоритет имеют фишки, отображающие сигналы логического нуля. Если хотя бы одна такая фишка есть во входных позициях, то при запуске простого перехода во все его выходные позиции помещаются фишки первого приоритета. Второй приоритет присваивается фишкaмj соответствующим сигналам логической единицы. Если во входных позициях имеется хотя бы одна такая фишка, а фишки первого приоритета отсутствуют, то при запуске перехода во всех его выходных позициях появятся фишки второго приоритета. Третий, самый низкий приоритет имеют фишки, соответствующие сигналам третьего высокоимпедансного состояния. Для того, чтобы во всех выходных позициях какого-либо простого перехода появились фишки третьего приоритета, необходимо, чтобы такие фиш-ки находились во Бсех входных позициях. В качестве примера рассмотрим СП, моделирующую показанную ранее на рис. 2.6 схему соединения двух шинных формирователей {рис. 2.8). Сложные переходы D1 и D2 соответствуют микросхемам а простые переходы - проводникам. Номера простых переходов и соответствующих им проводников совпадают. Обратим внимание на то, что выводы шин В являются двунаправленными, т. е. могут передавать или принимать информацию. При интерпретации двунаправленных выводов СП произведено их расщепление. Входные и соответствующие им выходные дуги моделирующие одноименные выводы шины В, также помечены одинаково. Некоторые простые . переходы имеют несколько входных позиций. Например, переход, соответствующий проводнику 7, соединен с тремя входными позициями (Р0П, Р15, Р36). При функционировании СП в указанных позициях могут оказаться фишки различных приоритетов. Однако при запуске перехода 7 во всех его выходных позициях появятся одинаковые фишки, имеющие приоритет, наибольший из приоритетов входных фишек. Это хорошо отражает реальные процессы, про- f,ZK исходящие в моделируемом ПУ. %ги Если, например, ВЫХОД В1 мик- рис. 2.8. Сеть Петри, моделирующая росхемы D1 находится в состоя- схему соединения двух шинных форми-нии вывода и передает сигнал рователей. единичного уровня, а вывод В1 микросхемы D2 находится в вы-сокоимпедансном состоянии, то на проводнике установится сигнал логической единицы. Если же при этом со стороны внешних зажимов печатной платы на проводник 7 поступит нулевой логический сигнал, результирующий потенциал проводника окажется нулевым. Итак, принятая система приоритетов фишек обеспечивает адекватное моделирование конфликтных ситуаций, возникающих при появлении сигналов различных логических уровней на выходах микросхем, соединенных между собой. 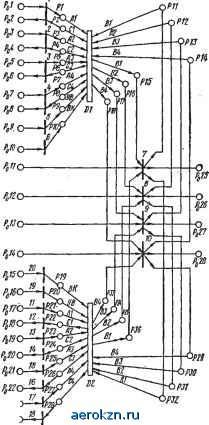 Глава 3 ПРОВЕРКА ПАРАМЕТРОВ АНАЛОГОВЫХ ЭРЭ И СОЕДИНЕНИЙ В РЕЖИМЕ ПОСТОЯННОГО ТОКА 1. РЕЖИМЫ И СПОСОБЫ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЭРЭ Диагностируемый ПУ посредством программируемого многоканального коммутатора подключается к измерительным устройствам. Количество одновременно коммутируемых точек выбирается минимальным из условия обеспечения независимого измерения параметров отдельных элементов. При каждом измерении формируется некоторый многополюсник (обычно двухполюсник или трех-полюсник). Взаимные сопротивления или проводимости сформированного многополюсника однозначно характеризуют значения, параметров контролируемых элементов. Взаимные параметры многоэлементной многополюсной цепи могут быть определены одним из следующих способов [301: путем измерения входных сопротивлений или проводимостей между двумя полюсами при различных режимах остальных полюсов с последующим решением уравнений и путем измерения токов и напряжений на зажимах многополюсника. В первом случае измерения проводятся с помощью мостовых устройств, а узлы объекта контроля коммутируются между собой. Такие способы рассмотрены в работе [20]. Необходимость выполнения вычислений и неоднозначность получаемых результатов существенно ограничивает их применение. Способы, основанные на измерении значений напряжений и токов, нашли применение практически во всех автоматизированных системах контроля и диагностирования РЭА. Они предусматривают либо непосредственное измерение напряжений и токов на зажимах контролируемых элементов, либо измерение некоторых разностных сигналов, получающихся в результате сравнения значений параметров измеряемого многополюсника с соответствующими значениями параметров образцового элемента. Значения параметров контролируемых элементов обычно определяются по результатам измерения токов или напряжений, возникающих под воздействием тестовых электрических сигналов в режиме заданного напряжения или в режиме заданного тока (источники ЭДС или источники тока). В табл. 3.1 приведены типичные режимы преобразования параметров различных элементов, применяемые в измерительных цепях постоянного тока автоматизированных систем поэлементного контроля и диагностирования. Режим выбирается исходя из соотношений значений контролируемых параметров, сопротивлений измерителей напряжения или тока и внутренних сопротивлений источников тестовых сигналов. Рассмотрим это на примере измерения сопротивления или проводимости резистора или какого-либо другого элемента. Аналогия- 32 у 3.1. Режимы измерения значений параметров ЭРЭ
шые результаты получаются при измерении значений коэффициент fa самоиндукции L катушки индуктивности или емкости С конденсаторов. На рис. 3.1, а показана схема измерения проводимости gt р режиме заданного напряжения. Напряжение U поддерживается Шостоянным, а ток 1а, протекающий через измеритель тока, зависит от значений gx: С 1 2 3 4 5 6 ... 17 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
© 2001 AeroKZN.ru.
Копирование текстов запрещено. |